
Votre panier est vide.
Capteur d’évitement d’obstacles infrarouge pour Ardu37. – Test et Avis
Blog > Capteur Infrarouge Arduino >
Test et avis sur le XINANDI-Capteur d’évitement d’obstacles infrarouge IR

.
.

Points Clés
| Caractéristiques | Description |
|---|---|
| Technologie | Moulage photoélectrique |
| Compatibilité | Ardu37, Robot de voiture intelligente bricolage |
| Broches | 3 |
Description du produit
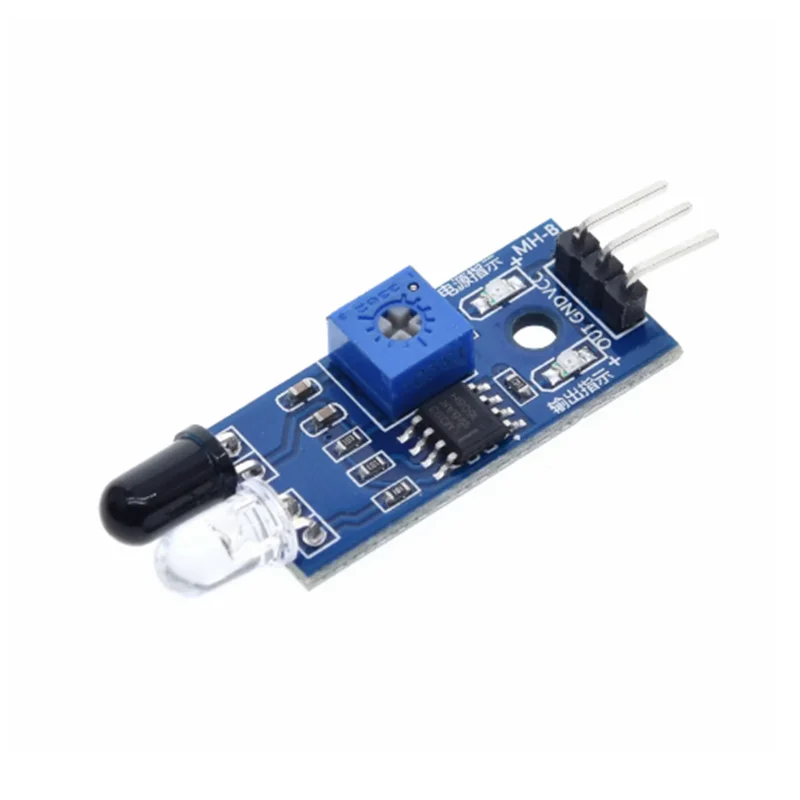
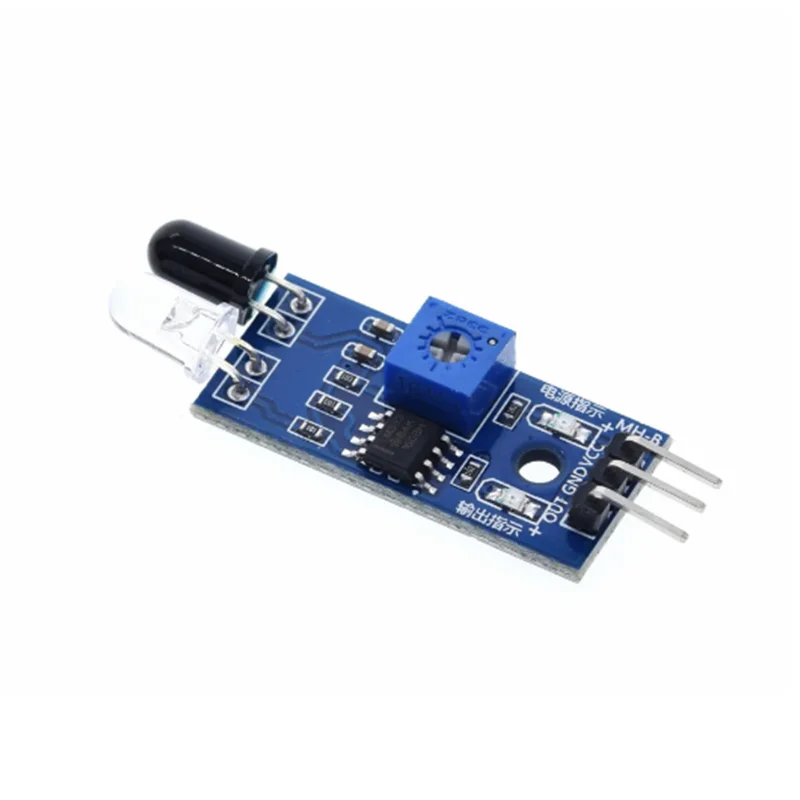
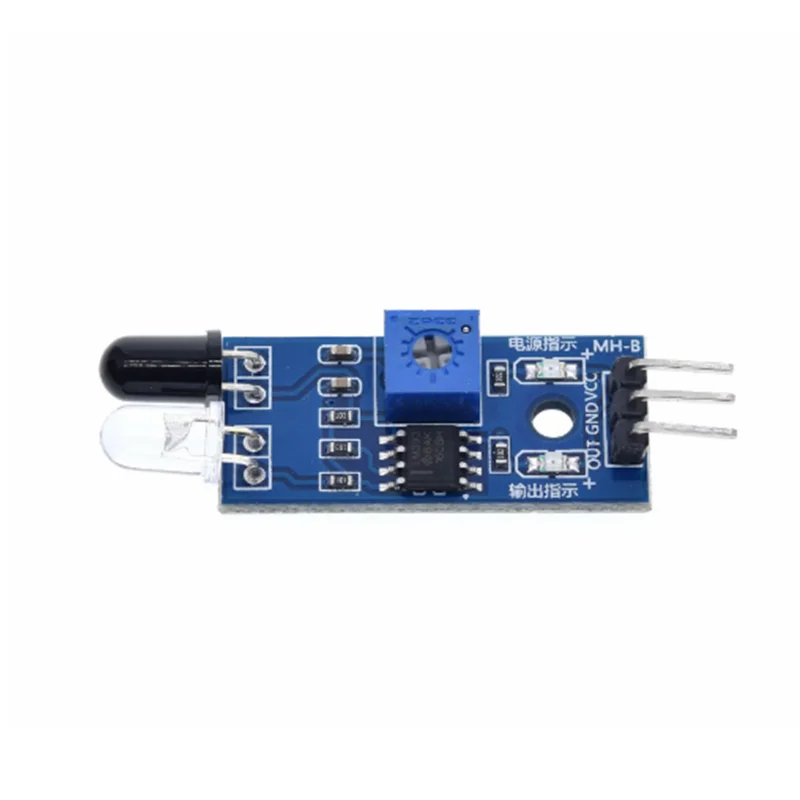
Le module de capteur XINANDI-Capteur d’évitement d’obstacles infrarouge IR a une forte adaptabilité à la lumière ambiante et dispose d’une paire de tubes émetteurs et récepteurs infrarouges. Le tube de transmission émet une certaine fréquence de rayons infrarouges. Lorsque la direction de détection rencontre un obstacle (surface réfléchissante), le rayon infrarouge est réfléchi par le tube récepteur. Après le traitement du circuit comparateur, le voyant vert s’allume, tandis que l’interface de sortie du signal produit le signal numérique (un bas signal de 0V). La distance de détection du capteur peut être ajustée par le potentiomètre, avec une plage effective de 2 ~ 30cm et une tension de fonctionnement de 3.3V – 5V. Il a les caractéristiques de petites interférences, un assemblage facile et une utilisation pratique. Il peut être largement utilisé dans de nombreuses occasions telles que l’évitement d’obstacles robot, la voiture d’évitement d’obstacles, le comptage de pipelines et le traçage de lignes noires et blanches.
Performance du produit
- Lorsqu’il n’y a pas de signal d’obstacle devant le module, le port OUT émet un niveau élevé (5V) en continu.
- Lorsque le module détecte le signal d’obstacle avant, l’indicateur vert sur la carte de circuit imprimé s’allume et le port OUT continue à émettre un signal faible (0V).
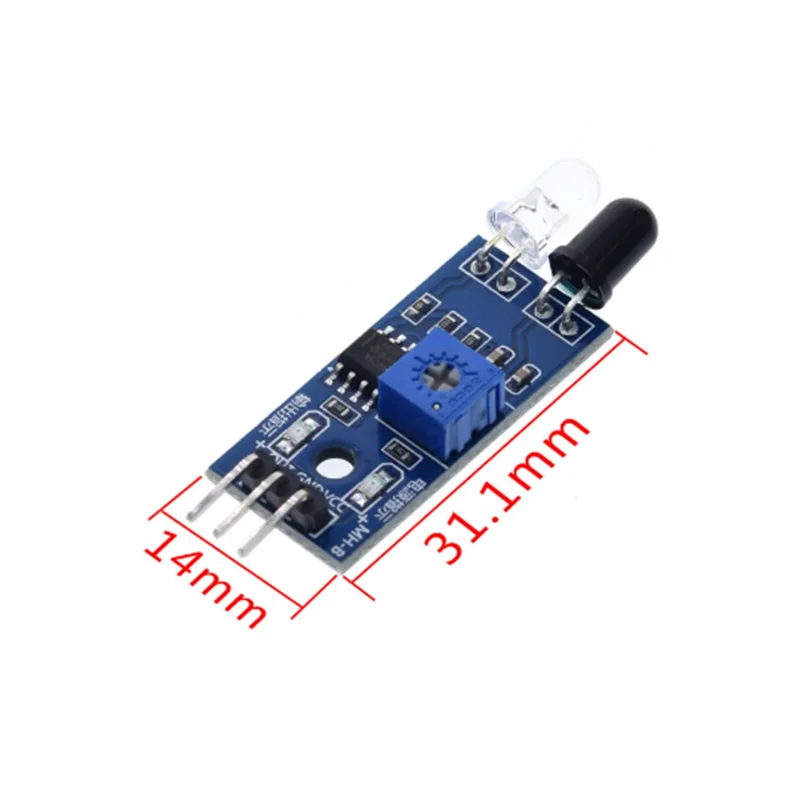
- Le module détecte une distance de 2 ~ 30 cm avec un angle de détection de 35°. La distance de détection peut être ajustée par le potentiomètre (sens horaire augmente, sens antihoraire réduit la distance de détection).
- Le capteur fonctionne par détection active par réflexion infrarouge, la réflectivité et la forme de la cible étant la clé pour détecter la distance.
- Le port de sortie du module de capteur OUT peut être directement connecté au port IO du microcontrôleur ou peut également piloter directement un relais 5V.
- Le module utilise le comparateur LM393, ce qui le rend stable.
- Il peut être alimenté par une source CC de 3.3V à 5V.
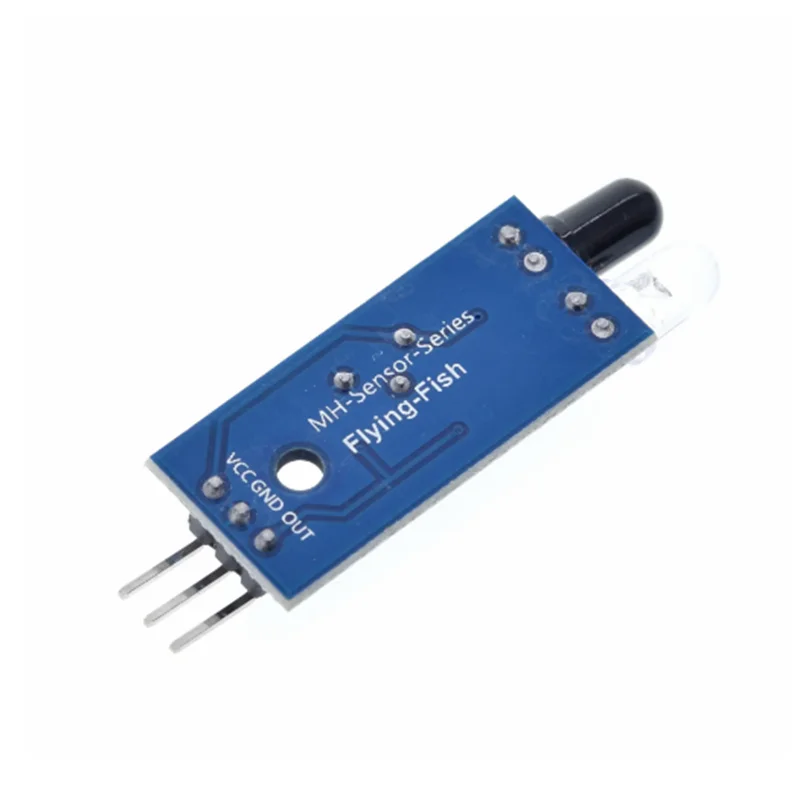
- Les connexions sont les suivantes : VCC – VCC, GND – GND et OUT – IO.
Que pensent les clients du produit
Aucun avis n’est disponible pour le moment.
Mon avis
Le XINANDI-Capteur d’évitement d’obstacles infrarouge IR est un choix solide pour les projets de robotique et de voiture intelligente. Sa technologie de moulage photoélectrique garantit une forte adaptabilité à la lumière ambiante. Sa plage de détection de 2 ~ 30 cm le rend polyvalent pour de nombreuses applications. De plus, sa facilité d’assemblage et d’utilisation le rendent accessible même aux débutants dans le domaine de la robotique. Cependant, il convient de noter que ce capteur utilise une seule interface de sortie numérique et ne fournit pas de mesure de distance précise. Malgré cela, le XINANDI-Capteur d’évitement d’obstacles infrarouge IR offre un excellent rapport qualité-prix et constitue un ajout précieux à tout projet de bricolage.
FAQ
Q: Ce capteur fonctionne-t-il avec une tension de 3.3V?
R: Oui, le capteur peut fonctionner avec une tension allant de 3.3V à 5V.
Q: Quelle est la distance maximale de détection du capteur?
R: La distance maximale de détection du capteur est de 30 cm, qui peut être ajustée à l’aide du potentiomètre