
Votre panier est vide.
“Servomoteur 16 canaux micro-bit” – Test et Avis
Blog > Mg90S Servo >

.
.

Points Clés
| Caractéristiques | Spécifications |
|---|---|
|
|
Aperçu général
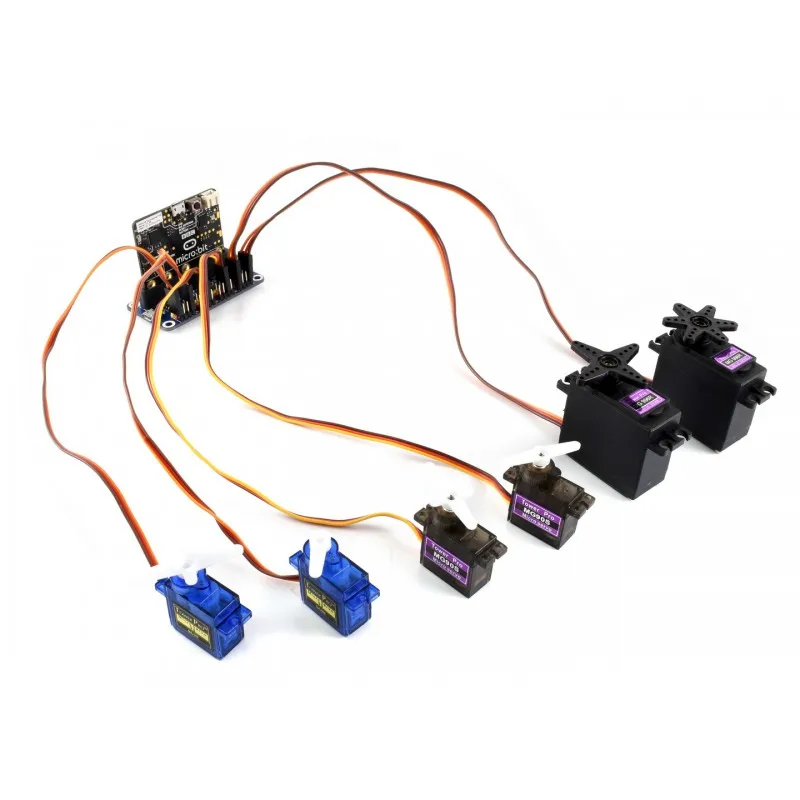
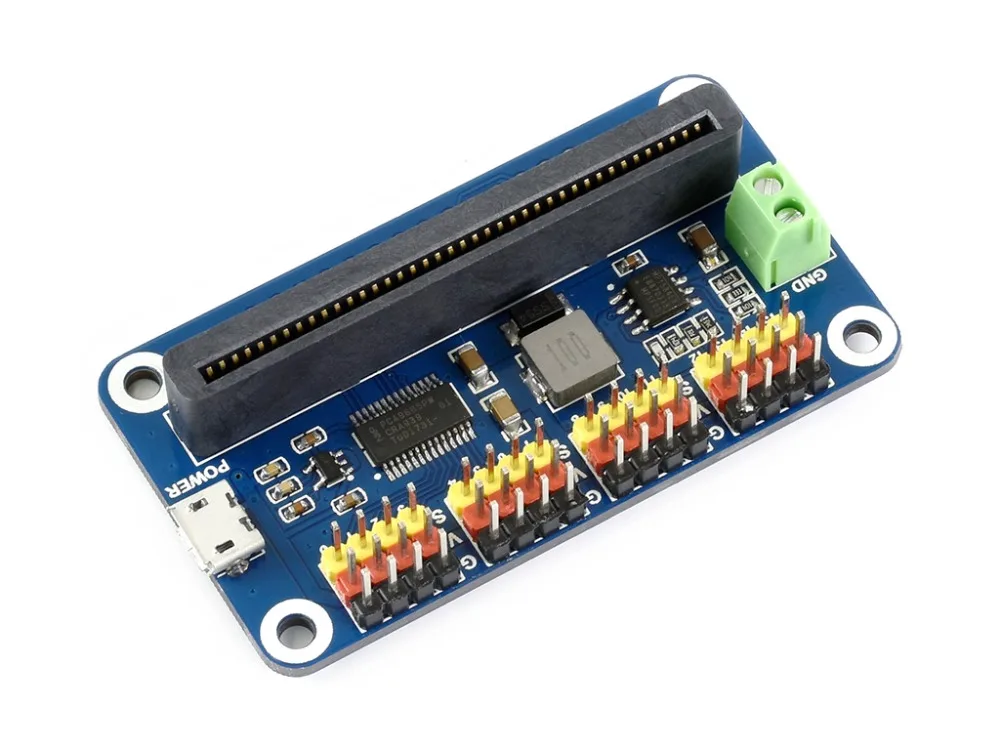
Avez-vous rencontré la limite de sortie PWM de micro:bit en essayant de faire un bras robotique ou n’importe quel robot qui nécessite beaucoup de servo? Nous comprenons tout à fait cette situation, même nous avons obtenu une excellente solution. Cette évasion de servomoteur pratique serait votre choix idéal.
Caractéristiques
- Connecteur de bord micro:bit, directement enfichable
- I2C contrôle, en utilisant seulement 2 broches
- Jusqu’à 16 sorties servo/PWM, résolution de 12 bits pour chaque canal (4096 échelles)
- Intègre un régulateur de 5V, courant de sortie jusqu’à 3A, peut être alimenté par batterie via la borne VIN
- L’interface servo standard, soutient le servo utilisé commun tel que SG90, MG90S, MG996R, etc.
- Broches de contrôle I2C réservées, permet de travailler avec d’autres cartes de contrôle
- Livré avec des ressources de développement et un manuel (exemples graphiques micro:bit comme Bluetooth/2.4G sans télécommande)
Spécifications
- Alimentation: 5V (connecteur d’alimentation) OU 6V ~ 12V (borne VIN)
- Tension servo: 5V
- Tension logique: 3.3V
- Conducteur: PCA9685
- Interface de contrôle: I2C
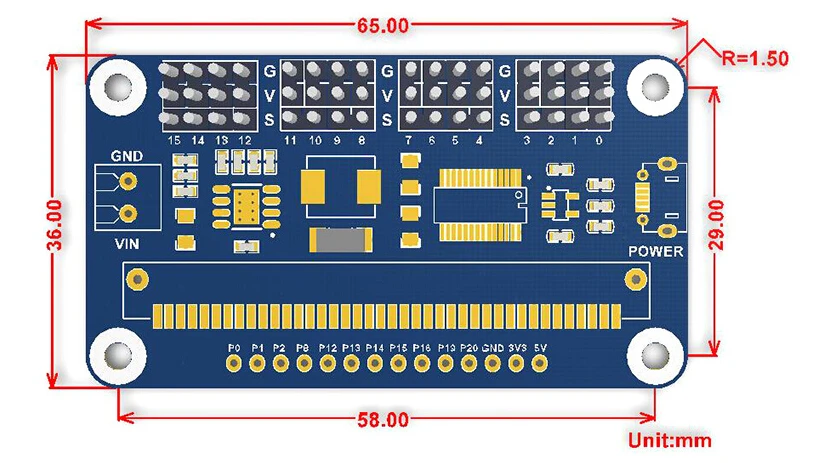
- Dimension: 65mm x 36mm
- Taille du trou de montage: 3.0mm
Dimensions
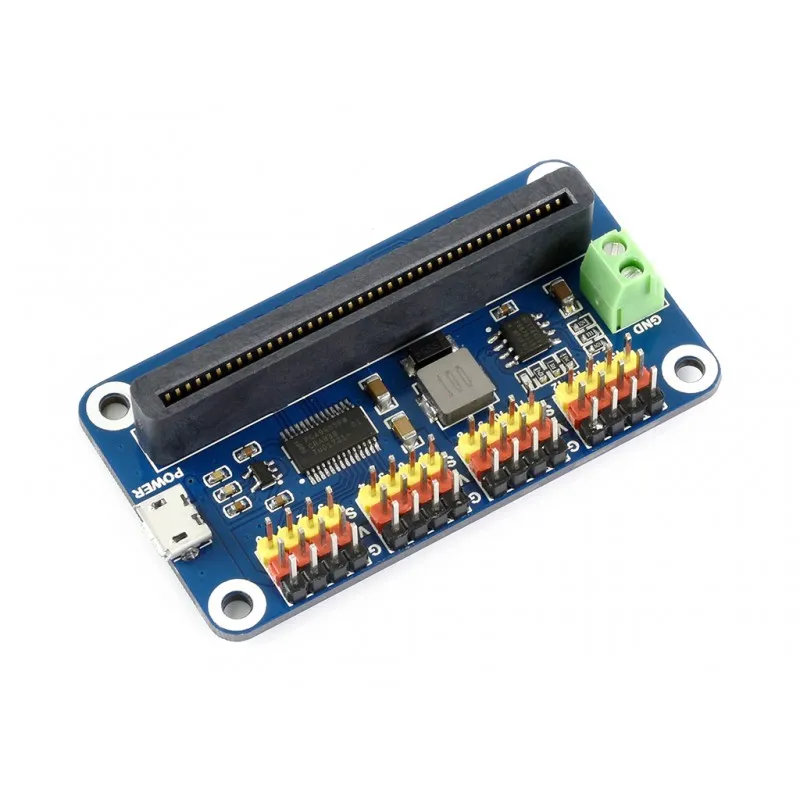
Photos


Ressources de développement
- Wiki: Paille
Contenu de l’emballage
- Pilote servo pour micro:bit x1
FAQ
1. Quelle est la tension d’alimentation du pilote de servomoteur pour micro:bit?
La tension d’alimentation du pilote de servomoteur pour micro:bit est de 5V (via le connecteur d’alimentation) OU de 6V ~ 12V (via la borne VIN).