
Votre panier est vide.

Caméra de profondeur RGBD pour robot – Test et Avis
Blog > Camera Usb Raspberry Pi >




.
.

“`html
Points Clés
- Caméra de profondeur Intel Realsense D430
- Capteur somatosensoriel
- Technologie de développement de robot ROS
- Processus visuel stéréo
Description du produit
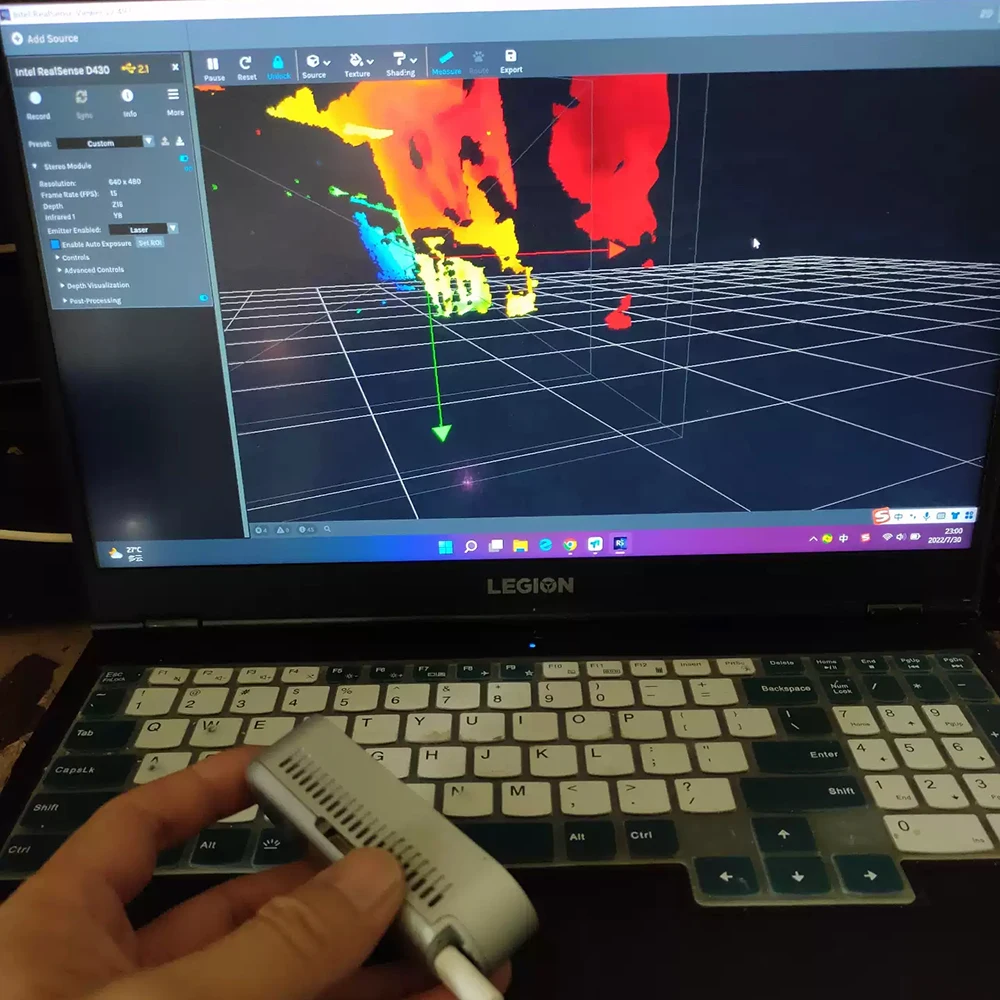
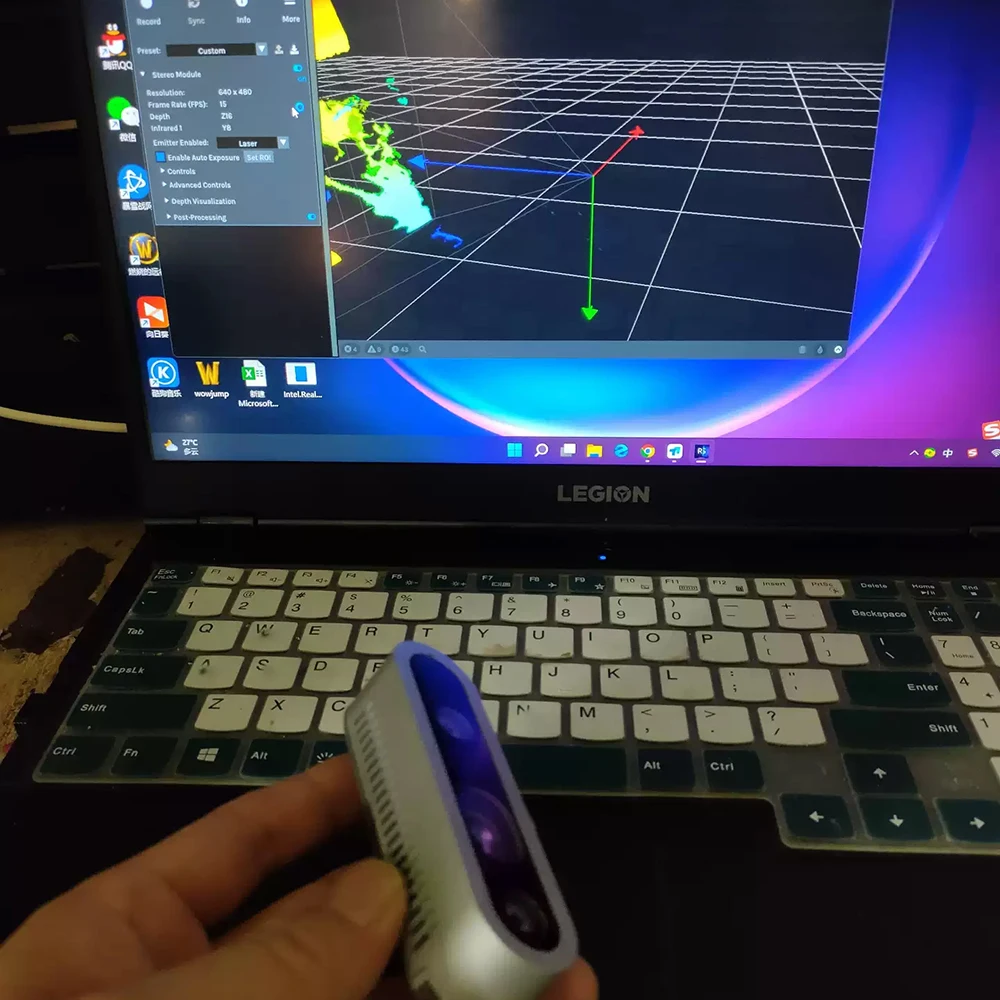
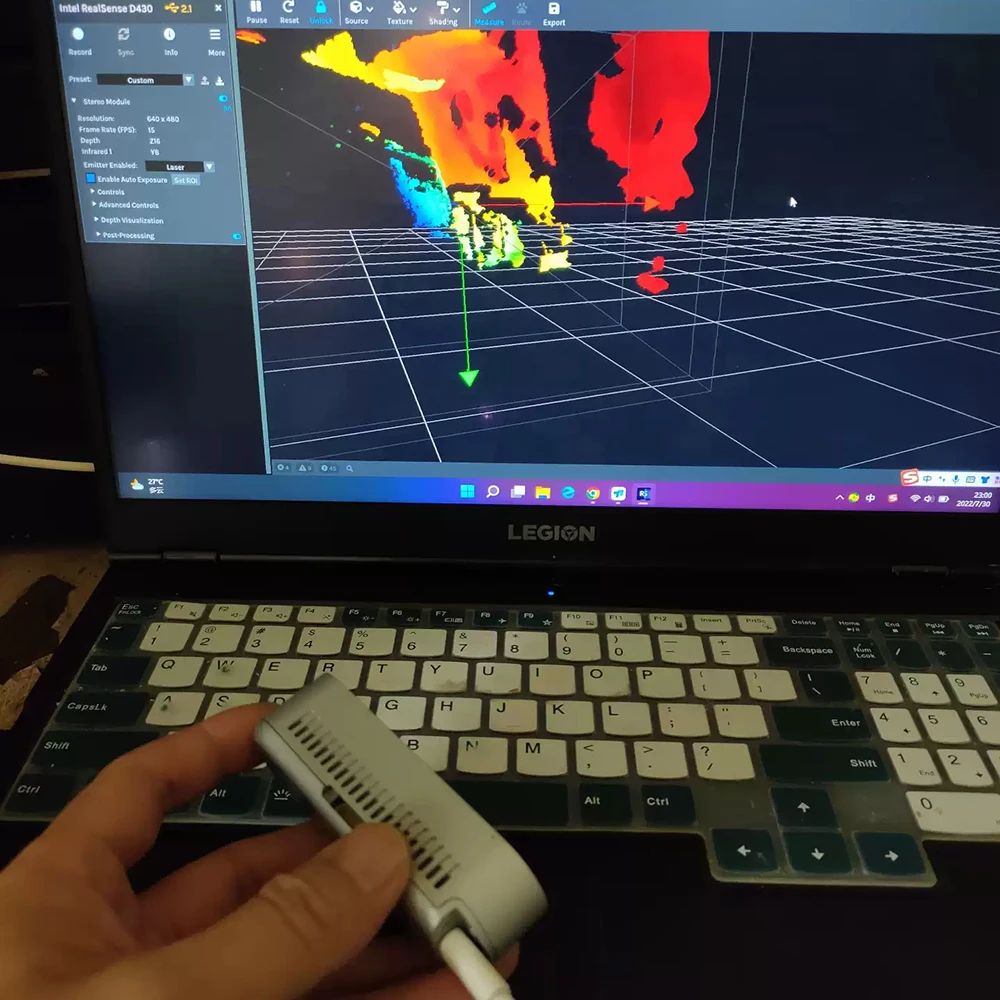
La caméra de profondeur Intel Realsense D430 est un capteur somatosensoriel qui utilise la technologie de développement de robot ROS et le processus visuel stéréo. Elle est spécialement conçue pour fournir des informations précises sur la profondeur et les mouvements.
Principales caractéristiques :
- Ligne de base [mm] : 50
- Technologie de profondeur : Stéréo IR actif
- Champ de vision Diagonale [°] : 100.6
- Champ de vision horizontal [°] : 91.2
- Champ de vision Vertical [°] : 65.5
- Résolution horizontale [px] : 1280
- Plage de tension d’entrée [V] : 1.8V – 3.3V
- Interface Connecteur carte à carte à 50 broches
- Taux d’images de profondeur max. à pleine résolution [fps] : 30 fps
- Résolution de profondeur max : 1280×720
- Portée maximale : 10m +
- Profondeur minimale Distance [mm] : 200
- Type de produit : Module caméra
- Capteur RVB : Non
- Type d’obturateur : Obturateur global
- Résolution verticale [px] : 800
Liste d’expédition :
- Caméra de profondeur * 1
- Câble USB * 1





Test et avis sur le produit
Ce produit est conçu pour répondre aux besoins des développeurs de robots qui nécessitent un suivi précis des mouvements et des informations de profondeur. La caméra de profondeur Intel Realsense D430 offre une résolution et une précision élevées, permettant aux robots de percevoir leur environnement de manière plus précise.
L’utilisation de la technologie de développement de robot ROS et du processus visuel stéréo garantit une intégration facile avec les systèmes existants et une compatibilité avec des plates-formes de développement populaires. De plus, la technologie Active IR offre des performances améliorées dans des conditions de faible luminosité.
Points forts :
- Haute résolution et précision
- Intégration facile avec ROS
- Compatibilité avec différentes plates-formes de développement
- Performances améliorées en faible luminosité
Limitations :
- Absence de capteur RVB
- Portée maximale limitée à 10m+
Ce que pensent les clients du produit
Aucun avis client disponible pour le moment.
FAQ
Q: Quelle est la résolution maximale de la caméra de profondeur Intel Realsense D430 ?
R: La résolution maximale de la caméra de profondeur est de 1280×720.
Q: La caméra de profondeur Intel Realsense D430 est-elle compatible avec ROS ?
R: Oui, la caméra de profondeur est compatible avec ROS grâce à sa technologie de développement de robot.
Q: Quelle est la portée maximale de la caméra de profondeur Intel Realsense D430 ?
R: La portée maximale est de 10m+.
“`